








PILIMtauControlled - Limited PI controller K,tau external parameters
Connection Diagram:
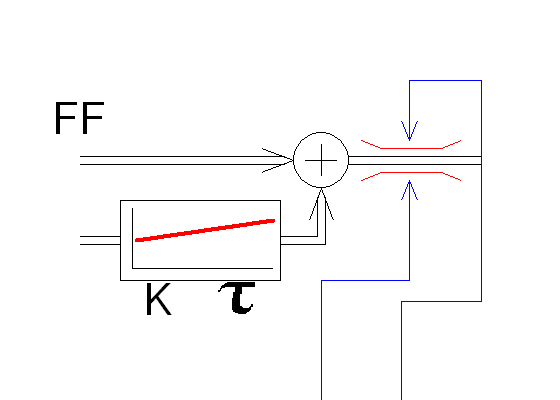
| FF |
| PI | |||
| IN | |||||
| AK | BTAU | CMIN | DMAX | ||
| Connections(36) | Position | Remark |
| PI | Right | Output |
| IN | Left | Input |
| FF | Left | |
| DMAX | Bottom | Upper Limit |
| CMIN | Bottom | Lower Limit |
| BTAU | Bottom | Time constant |
| AK | Bottom | Proportianal Gain |
| Parameters(0) | Default | Remark |
| Function | PI controller where the integration I is limited between min and max Parameters are specified as the proportional gain K and time constant tau and input as external signals | |
| Special | The limiter is inside the integrator I and therefore has anti-windup | |
| Status | Standard | |
| Export of Embedded C Code | YES | |
| Select from | Components\Library\AdvancedElectricalDrives\Control\Vector | |
See also
MAC, MovingAverage, PILIM, PILIMtau,