






Graphics
Numeric results
Help
imax=10000τe=10[ms]
τm=20[ms]
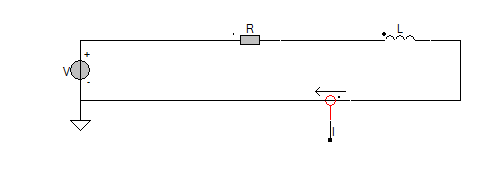
Ra=1000[mΩ]
La=10[mH]
τi=0.01[[s]]
| Nominal current | In | 0 | [Ampere] |
| Nominal Torque | Tn | 0 | [Nm] |
| Torque constant | Kt | 0 | [Nm/A] |
| Back emf constant | Ke | 0 | [V/(Rad/s)] |
| Electrical time constant | τe | 10 | [ms] |
| Mechanical time constant | τm | 20 | [ms] |
| Rotor inertia | J | 0 | [mKgm2] |
| Stator winding resistance | Ra | 1000 | [mΩ] |
| Stator winding inductance | La | 10 | [mH] |
| Back EMF | Vemf | 0 | [V] |
| Vloss | VRa | 0 | [V] |
| Ploss | PRa | 0 | [W] |
| Pmechanic | Pm | 0 | [W] |
| Pelectric | Pe | 0 | [W] |
| Current control gain | Ki | 0 | [[V/I]] |
| Current control τ | τi | 0.01 | [[s]] |
| Speed control gain | Ks | 0 | [[I/ω]] |
| Speed control τ | τs | 0 | [[s]] |
Help
Enter the nominal power, voltage and angular speed and see the open loop response of this motor drive.
To change the winding resistance Ra, change the efficiency η of the motor
To change the motor constant Ke and Kt, change either the motor voltage Vn or the nominal speed ωn of the motor
4
5